Projet STS CIM 2016 : Module d’orientation caméra ROV
(actualisé le )
Pour réaliser les plongées des expéditions futures, Under The Pole veut disposer d’un ROV (remotely operated vehicle) léger.
En 2016, pour l’équipe d’étudiants, il s’agit d’équiper un ROV d’une caméra de pilotage avec support motorisé.
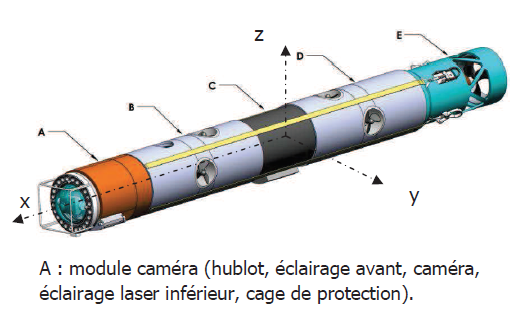
Ce système se logera dans le module caméra placé à l’avant du ROV.
Le pilotage du ROV et du support de caméra sont assurés par un carte de commande.

Cahier des charges
Voir en ligne : http://www.underthepole.com/


Partager cette page